6 Loi de comportement élastique linéaire
D'après Equation 4.3, à cause de l'hypothèse (ii) de Bernouilli, seules les composantes \(\sigma_{11},\;\sigma_{12},\;\sigma_{13}\) de la contrainte sont non nulles. En conséquence, en utilisant la loi de comportement linéaire isotrope (coefficient de Poisson \(\nu\) et module d’Young \(E\)), \[ \overline{\overline{\varepsilon}} \; = \; - \displaystyle\frac{\nu}{E} Tr\left( \overline{\overline{\sigma}}\right)\overline{\overline{I}}\;+\; \displaystyle\frac{1+\nu}{E} \overline{\overline{\sigma}} \tag{6.1}\] on obtient aisément les composantes du tenseur des déformations \[\begin{array}{l} {\varepsilon _{11}} = \displaystyle\frac{1}{E}{\sigma _{11}},\quad {\varepsilon _{22}} = {\varepsilon _{33}} = \displaystyle\frac{{ - \nu }}{E}{\sigma _{11}},\quad {\varepsilon _{12}} = \displaystyle\frac{{1 + \nu }}{E}{\sigma _{12}},\quad {\varepsilon _{13}} = \displaystyle\frac{{1 + \nu }}{E}{\sigma _{13}},\quad {\varepsilon _{23}} = 0 \end{array}\] D’où l’expression des contraintes généralisées en fonction de déformations généralisées:
\[\begin{array}{l} T_1 = \displaystyle\iint_{S(X_1)} {\sigma_{11} \;dX_2 dX_3} = \iint_{S(X_1)} {E \varepsilon_{11} \;dX_2 dX_3} = \iint_{S(X_1)} {E \left( a_1 + \chi_2 X_3 - \chi_3 X_2\right) \;dX_2 dX_3}\\ T_2 = \displaystyle\iint_{S(X_1)} {\sigma_{12} \;dX_2 dX_3} = \iint_{S(X_1)} {\displaystyle\frac{E}{1+\nu} \varepsilon_{12} \;dX_2 dX_3} = \iint_{S(X_1)} {\displaystyle\frac{E}{2(1+\nu)} \left( a_2 - \chi_1 X_3\right) \;dX_2 dX_3}\\ T_3 = \displaystyle\iint_{S(X_1)} {\sigma_{13} \;dX_2 dX_3} = \iint_{S(X_1)} {\displaystyle\frac{E}{1+\nu} \varepsilon_{13} \;dX_2 dX_3} = \iint_{S(X_1)} {\displaystyle\frac{E}{2(1+\nu)} \left( a_3 - \chi_1 X_2\right) \;dX_2 dX_3}\\ M_1 = \displaystyle\iint_{S(X_1)} {\left( X_2 \sigma_{31} - X_3 \sigma_{21} \right) \;dX_2 dX_3} = \iint_{S(X_1)} {\displaystyle\frac{E}{2 (1+\nu)} \left( - a_2 X_3 + a_3 X_2 + \chi_1 \left( X_2^2 +X_3^2 \right) \right) \;dX_2 dX_3}\\ M_2 = \displaystyle\iint_{S(X_1)} {X_3 \sigma_{11} \;dX_2 dX_3} = \iint_{S(X_1)} {E \left( a_1 X_3 + \chi_2 X_3^2 - \chi_3 X_2 X_3\right) \;dX_2 dX_3}\\ M_3 = \displaystyle - \iint_{S(X_1)} {X_2 \sigma_{11} \;dX_2 dX_3} = \iint_{S(X_1)} {E \left( - a_1 X_2 - \chi_2 X_2 X_3 + \chi_3 X_2^2\right) \;dX_2 dX_3} \end{array}\]
Pour simplifier les écritures, nous définirons la fibre moyenne , comme passant en \(G\) sur la section \(S(X_1)\), telle que \[\iint_{S(X_1)} {E \;\overrightarrow {GM} \;dX_2 dX_3} \; = \; \overrightarrow 0 \] ou encore \[\iint_{S(X_1)} {E\, X_2 \,dX_2 dX_3} \; = \; 0 \quad , \quad \iint_{S(X_1)} {E \,X_3 \;dX_2 dX_3} \; = \; 0 \]
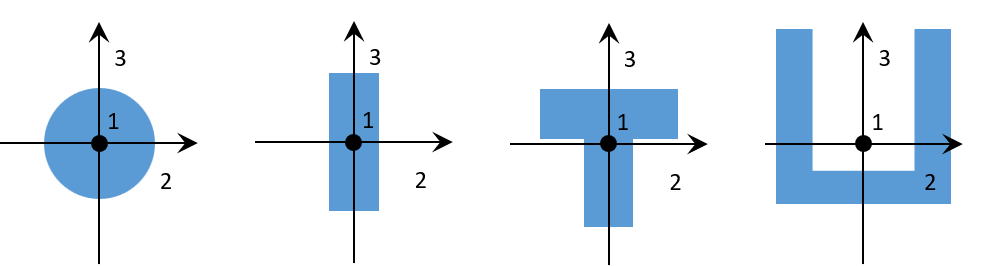
C’est à dire que l’on choisit de faire passer la fibre moyenne par le centre de gravité pondéré des modules d’Young de la section. De plus, la plupart des sections de poutres usuelles présentent des axes de symétrie. Il est donc souvent possible de choisir \(\vec e_2\) tel que : \[\iint_{S(X_1)} {E \,X_2 \,X_3 \;dX_2 dX_3} \; = \; 0 \]
Par exemple, comme illustré sur la figure suivante, pour quelques sections usuelles de poutres, on peut représenter le repère autorisant de telles simplifications.
Dans ces conditions, la loi de comportement se simplifie considérablement, d’autant que les déformations généralisées ne dépendent que de \(X_1\).
\[\begin{array}{l} T_1 = a_1 \displaystyle\iint_{S(X_1)} {E \;dX_2 dX_3}\\ T_2 = a_2 \displaystyle\iint_{S(X_1)} {\displaystyle\frac{E}{2(1+\nu)} \;dX_2 dX_3}\\ T_3 = a_3 \displaystyle\iint_{S(X_1)} {\displaystyle\frac{E}{2(1+\nu)} \;dX_2 dX_3}\\ M_1 = \chi_1 \displaystyle\iint_{S(X_1)} {\displaystyle\frac{E}{2 (1+\nu)} \left( \left( X_2^2 +X_3^2 \right) \right) \;dX_2 dX_3}\\ M_2 = \chi_2 \displaystyle\iint_{S(X_1)} {E X_3^2 \;dX_2 dX_3}\\ M_3 = \chi_3 \displaystyle\iint_{S(X_1)} {E X_2^2 \;dX_2 dX_3} \end{array}\]
Si de plus les caractéristiques (\(E\) et \(\nu\)) ne dépendent pas de l’espace (un seul matériau), on obtient alors:
\[\begin{array}{l} T_1 \,=\, a_1\,E\,S\quad ,\quad T_2 \,=\, a_2\,G\,S\quad ,\quad T_3 \,=\, a_3\,G\,S\\ M_1 \,=\, \chi_1\,G\,I_1\quad ,\quad M_2 \,=\,\chi_2\,E\,I_2\quad ,\quad M_3 \,=\, \chi_3\,E\,I_3 \end{array} \tag{6.2}\]
Où \(G = \displaystyle\frac{E}{2(1 + \nu )}\) est le module de Coulomb, \(S\) l’aire de la section et
\(I_1 =\displaystyle\iint_{S(X_1)} {\left( X_2^2 +X_3^2 \right) \;dX_2 dX_3}\) est le moment quadratique autour de l’axe \((G,\vec e_1)\),
\(I_2 =\displaystyle\iint_{S(X_1)} { X_3^2 \;dX_2 dX_3}\) est le moment quadratique autour de l’axe \((G,\vec e_2)\) et
\(I_3 =\displaystyle\iint_{S(X_1)} { X_2^2 \;dX_2 dX_3}\) est le moment quadratique autour de l’axe \((G,\vec e_3)\).